CUQI is a research project at DTU Compute, headed by Prof. Per Chr. Hansen.
It is financed by VILLUM Fonden through a Villum Investigator grant of DKK 34,899,255.
The project runs from Sept. 1, 2019 to August 31, 2026. It is a highly collaborative grant which owes it succes to the work package leaders:
> Assoc. Prof. Martin S. Andersen: numerical optimization methods.
> Assoc. Prof. Yiqiu Dong: goal-oriented UQ, dimension reduction, non-Gaussian priors, sampling methods
> Assoc. Prof. Jakob Sauer Jørgensen: scientific software development, UQ for tomography
> Assoc. Prof. Mirza Karamehmedovic: modeling with UQ
> Professor Kim Knudsen: deterministic and statistical consistency


Funding
Villum Fonden (the Villum Foundation) is one of Denmark's largest research funding foundations with annual grants of approx. DKK 500 million. Their aim is to foster research at the highest international level platformed at Danish universities and research institutions.
What is CUQI
CUQI is a research project where we develop a mathematical, statistical and computational framework for applying uncertainty quantification (UQ) to inverse problems. We also develop a software package CUQIpy for UQ modeling and computations, see below.
● UQ characterizes the sensitivity of a solution taking into account errors and inaccuracies in the data, models, etc.
● Inverse problems determine hidden information from measurements in, e.g., deconvolution, image deblurring, tomographic imaging, and source reconstruction.

Achievements
Our research focused on both theoretical and computational results that contribute to a solid mathematical foundation for uncertainty quantification (UQ). We also built a software package called CUQIpy that allows experts and non-experts to apply UQ to their inverse problems.
● The theoretical outcome is a mathematical basis for UQ studies of a range of inverse problems with different priors and noise models. Highlights include analysis of ice-sheet flow in climate modeling and transport problems in biomathematics, new methods for tumor and defect detection in X-ray CT, model reduction methods to reduce the computational efforts, and a novel framework for understanding the role of constraints in the UQ priors.
● Another outcome is the open-source software CUQIpy. We have succeeded in developing a modeling and computational platform that can handle a range of linear and nonlinear inverse problems, including those formulated as partial differential equations. Many of the methods and techniques developed in the CUQI project are, for the first time, available in this package.
The Villum InvestIgator
>> High-Definition Tomography (HD-Tomo) funded by an ERC Advanced Research grant
>> Improved Impedance Tomography with Hybrid Data, together with Prof. Kim Knudsen, funded by the Danish Council for Independent Research.
Per Christian Hansen is the (co-)author of five books, 120+ papers and seven software packages. His research focuses on computational methods, e.g., for regularization methods, imaging, tomography, and subspace methods for signal processing. All his activities comprise a combination of theoretical insights and computational methods.
Snapshots of CUQI research in 2023, 2024, and 2025
CUQI was well represented at the AIP 2023 conference in Göttingen, Sept. 4-8, where we co-organized 7 mini-symposia and gave 12 talks and one poster. The presentations, which are available on this page, give a good snapshot of our research activities in 2023.
We were also well represented at the SIAM UQ24 conference in Trieste, Feb. 27 - March 1, 2024, where we gave 5 talks and 3 posters. The presentations are available on this page.


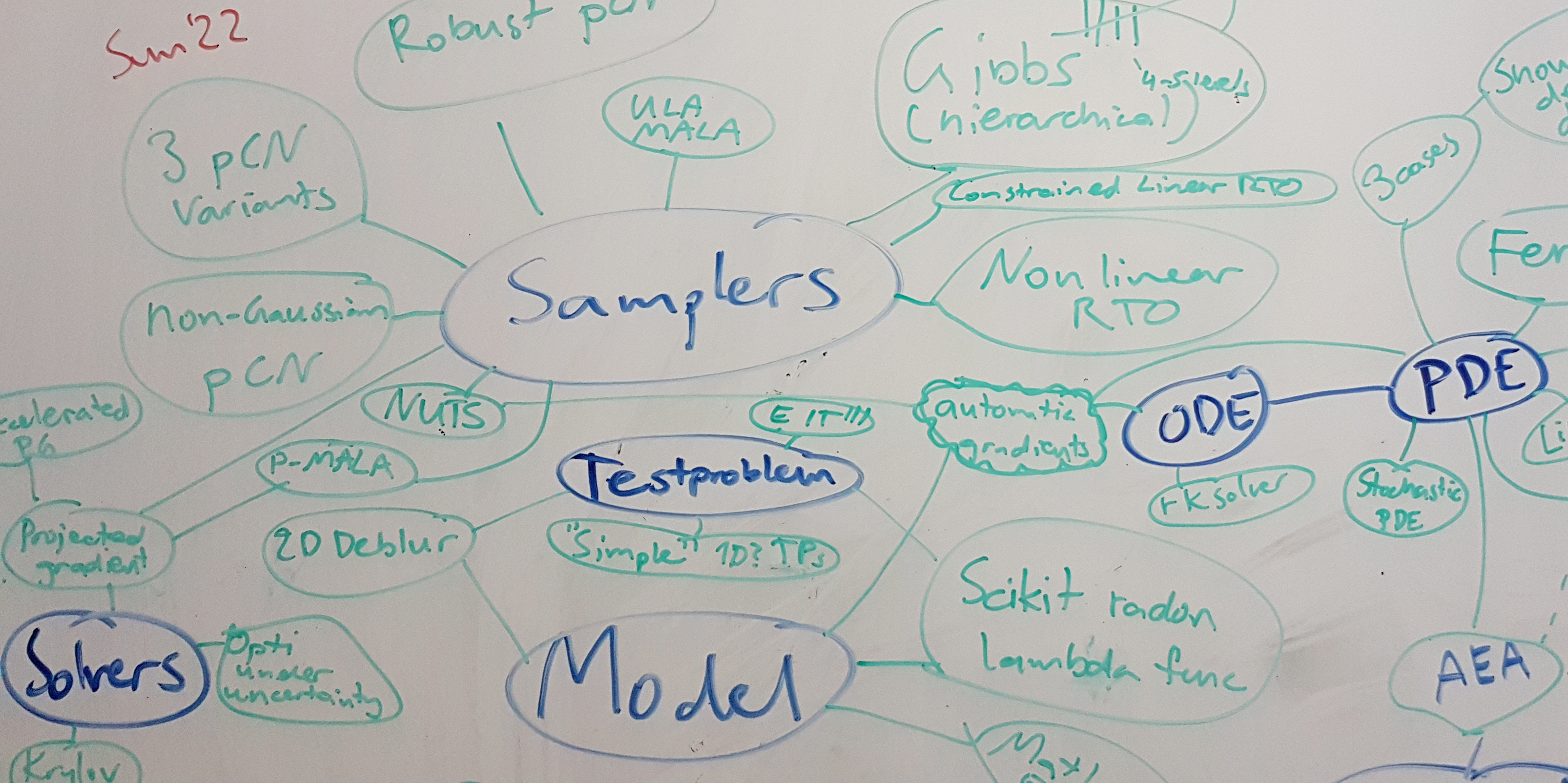
In 2025 we started a concerted effort to produce an interactive textbook aiming at introducing Bayesian inverse problems and how they can be solved by means of our CUQpy software. The book contain lots of training material and snippets of Python can that the reader can run, and modify, in order to experiment with different test problems, priors, sampling algorithms, etc.
The picture on the right is not from a Japanese horror film, but rather an illustration from the textbook with a visualization of the sampling of a rather complex posterior.

CUQIpy Software
To enable end-users to make use of our research, we published free open-source software that implements the theoretical and computational foundations developed during the project.
The Python software package CUQIpy implements a computational abstraction layer for UQ studies of inverse problems aimed at non-experts. In addition to the main software we also host individual software from papers and projects under the CUQI GitHub organization, including a growing collection of plugins for CUQIpy.
Click these links to learn more about CUQIpy: documentation and GitHub. We have given training courses on CUQIpy; see Courses Etc below. Potential users are welcome to contact us.
The CUQIpy software is now integrated in UM-Bridge, a high-level abstraction and software protocol that facilitates interoperability of UQ software with simulation codes.

The picture shows the CUQIpy software team, as of Oct. 2023. From left to right: senior researcher Jakob S. Jørgensen, postdoc Nicolai A. B. Riis, postdoc Amal M. A. Alghamdi, and postdoc Chao "Charlie" Zhang.
Read more about the software in the CUQIpy papers Part 1 and Part 2, and on this link: Free software quantifies uncertainties in CT scans.
And here is a YouTube video with a presentation of CUQIpy, given by Amal M. A. Alghamdi at the Bayes@Lund workshop on Jan. 23, 2023.
Examples of our Research in CUQI
UQ provides a tool to assess the "quality" of a reconstruction - a solution to an inverse problem - with respect to the influence of errors. It tells us how much we can trust the reconstruction and its details. UQ is useful in science, engineering, medical imaging and many other applications where we solve an inverse problem to reveal hidden information. For example, we can apply it in industrial inspection when looking for anomalies or defects in an object, in medical imaging when looking for malignant tissue, and in acoustics when identifying the location of unwanted sound sources.
Below we illustrate our work on computational UQ for inverse problems with a few examples from ongoing research projects in CUQI. These examples illustrate various methodologies for implementing, applying and using UQ. Many of these examples use our CUQIpy software mentioned above. For more details see the references in the list of publications below.
UQ of Tracer Transport in the Cochlear Aqueduct
Tracers injected into the cerebrospinal fluid that surrounds the brain reach the cochlea (a spiral-scaped cavity) in the inner ear via the so-called cochlear aqueduct (CA). The recent discovery of a membrane in the aqueduct raises questions about the restrictions of transport between the compartments and implications on the delivery of therapeutics to the inner ear to rescue hearing. A CT study was conducted to quantify the diffusive and advective modes of transport through the aqueduct in mice.
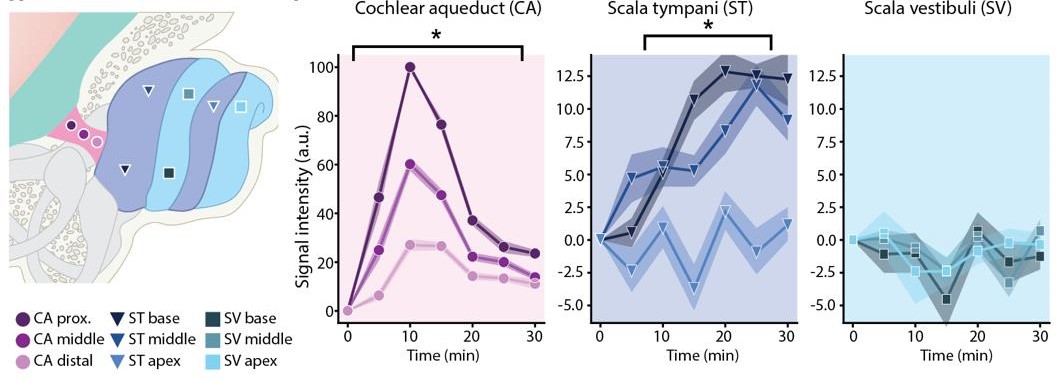
The above figure from Mathiesen et al. (2023) shows tracer concentration measurements at various locations in the CA and the cochlea. The forward model has the form yobs = A(x) + noise, where x represents the unknown spatially varying diffusivity and advection speed, the data yobs is the concentrations at given times and locations in the CA, and A represents a PDE-based forward model in the form of a time-dependent diffusion equation:
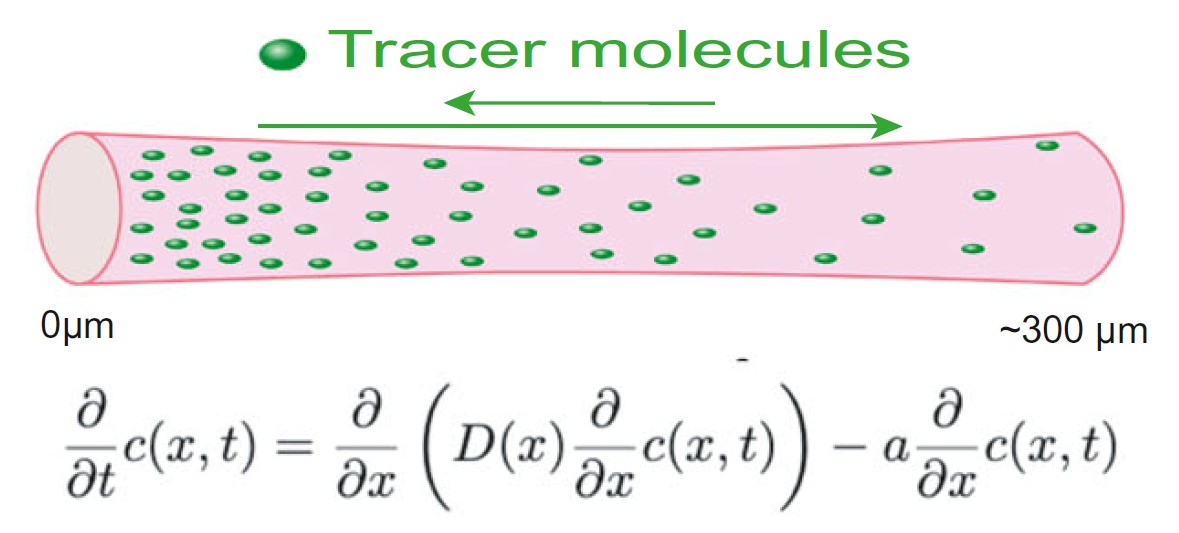
We estimate the transport model parameter, allowing the diffusivity to vary in space with potential membranes. The computations utilize the PDE-based inverse problem facilities in the CUQIpy software. The PDE is discretized using first-order finite differences in space and backward Euler in time.
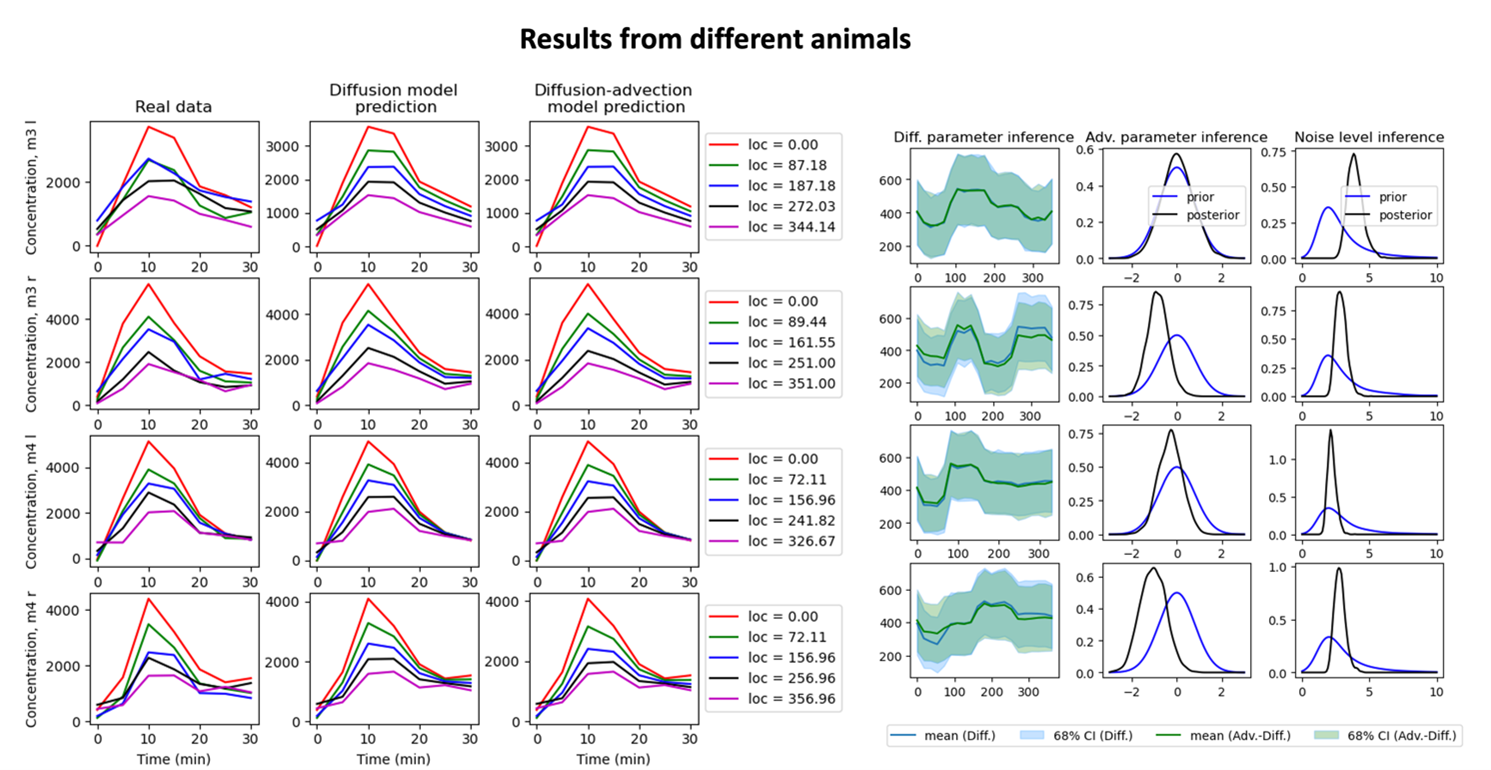
The figure below shows preliminary computational results using data from different mice. These results illustrate the identification of a spatially varying diffusivity in the CA. Moreover, small advection of various degrees is detected in some cases. See the paper for details and recent results.
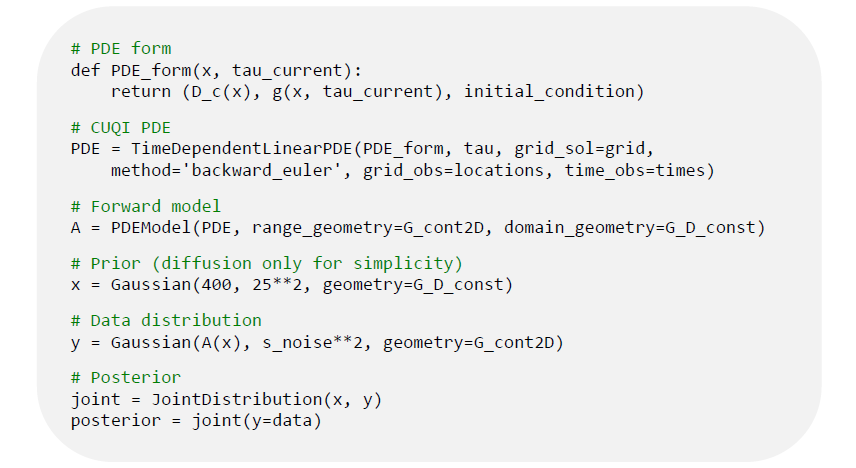
Below are elements of the CUQIpy code for the simulations.
This is joint work between Amal Alghamdi & Jakob Sauer Jørgensen from CUQI, Peter A. R. Bork from the Center for Translational Neuromedicine at Copenhagen University, and Barbara Koch Mathiesen from Nykøbing F. Hospital, with collaborators Maiken Nedergaard and Leo Miyakoshi.
The work is described in the paper in J. Assoc. for Research in Otolaryngology.
The Bayesian Approach to Inverse Robin Problems in Ice Flow
Ice-sheet models are important components of long-term sea level predictions. A crucial model parameter is the basal drag coefficient, which is a spatially varying parameter that models the slipperiness of the lubricating sediment beneath the ice.
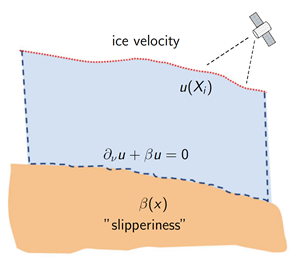
The ice flow can be modeled by a Stokes system of partial differential equations, where the basal drag coefficient β enters in a Robin boundary condition on the bottom part of the ice boundary. On the surface of the ice, we make N observations Yi of the ice velocities at locations Xi picked uniformly at random:
Yi = u(Xi) + εi , i = 1,...,N .
Here, u is the ice velocity that depends on β and εi is Gaussian noise. Estimation of β is a nonlinear and severely ill-posed inverse problem known as an inverse Robin problem.
From a mathematical point of view little is known about the reliability of the Bayesian approach for such nonlinear inverse problems. But if we use Gaussian priors with a favorable covariance structure then more can be said. As an example, consider two Gaussian priors suited for estimating β on the interval [0,1]: the Matérn prior and the squared-exponential Gaussian prior, samples of which are shown below.
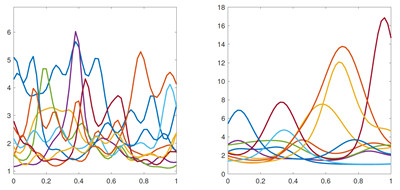
For these two choices of priors, we can guarantee that the Bayesian approach is reliable when applied to a simplified inverse Robin problem. If the ground truth β is Sobolev regular of some index, then the posterior mean from a suitable Matérn prior converges to β (in prob.) at a logarithmic rate as N → ∞. Similarly, if β is analytic (very smooth) then we have convergence for the squared-exponential prior at rate N−σ as N → ∞.
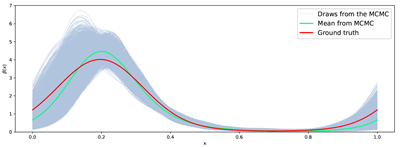
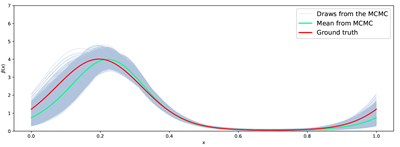
The figure below shows the ground truth, the conditional mean, and samples from the posterior using the Matérn prior (top) and the squared-exponential prior (bottom). We see that there is less uncertainty for the latter prior in this example.
This work was carried out by PhD student Aksel Kaastrup Rasmussen and it is documented in the paper with Seizilles, Girolami & Kazlauskaite (2023). Software is available as a CUQIpy notebook.
Boundary Detection in X-Ray CT Applications
In 2D CT, every X-ray going through the object is characterized by its slope θ with the horizontal axis. In practice, a full-angle geometry where θ covers the entire interval [0,π) is not always possible. This could be due to obstacles in the CT measurement setup or to avoid unhealthy levels of radiation exposure. In such cases, a limited-angle geometry is needed, i.e., θ belongs to the reduced interval [0,θmax) with θmax ≪ π. In such a setup, the quality of reconstructed image is compromised when conventional reconstruction methods are applied.
In many X-ray CT applications, the boundaries of objects - as well as their roughness - contain valuable information, e.g., to differentiate between benign and malignant tumors. Confidence in estimating such features helps with an accurate diagnosis and designing an effective treatment plan. A common approach in detecting boundaries is via an image segmentation post-processing step, but the quality of the estimated boundaries is compromised in the limited-angel case.
We provide a novel goal-oriented, Bayesian framework for the limited-angel CT problem, in which we reconstruct the boundaries directly from the data without the need for reconstructing the image. Moreover, we quantify the uncertainty of the boundaries and their roughness. This approach avoids error propagation and reduces the dimensionality of the problem from finding a 2D image to a 1D boundary of a region.
Our key ingredient is a hierarchical Bayesian approach to estimating the roughness of a scalar function, based on a Whittle-Matérn covariance prior and the level of fractional differentiability. We also developed an efficient FFT-based computational method for implementing this. Numerical results indicate that this framework is a promising and effective tool for solving a broad range of inverse problems where the regularity of functions carries critical information.
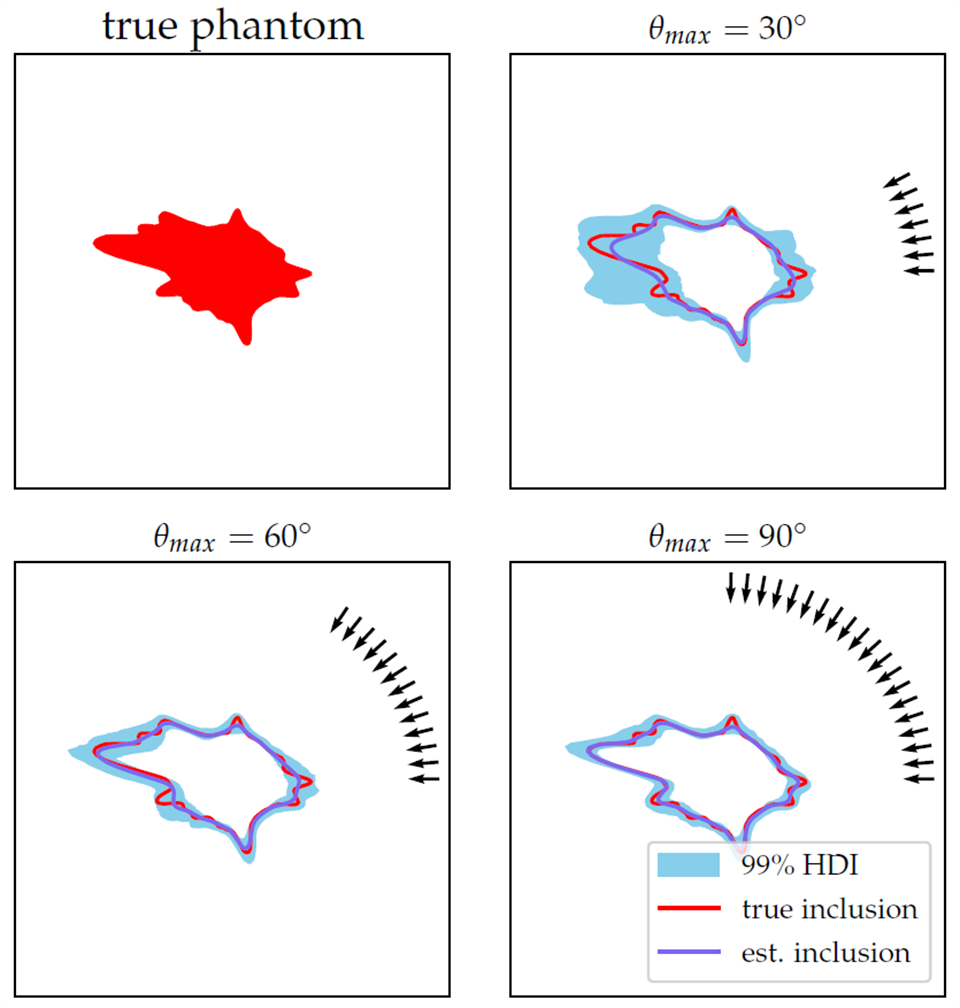
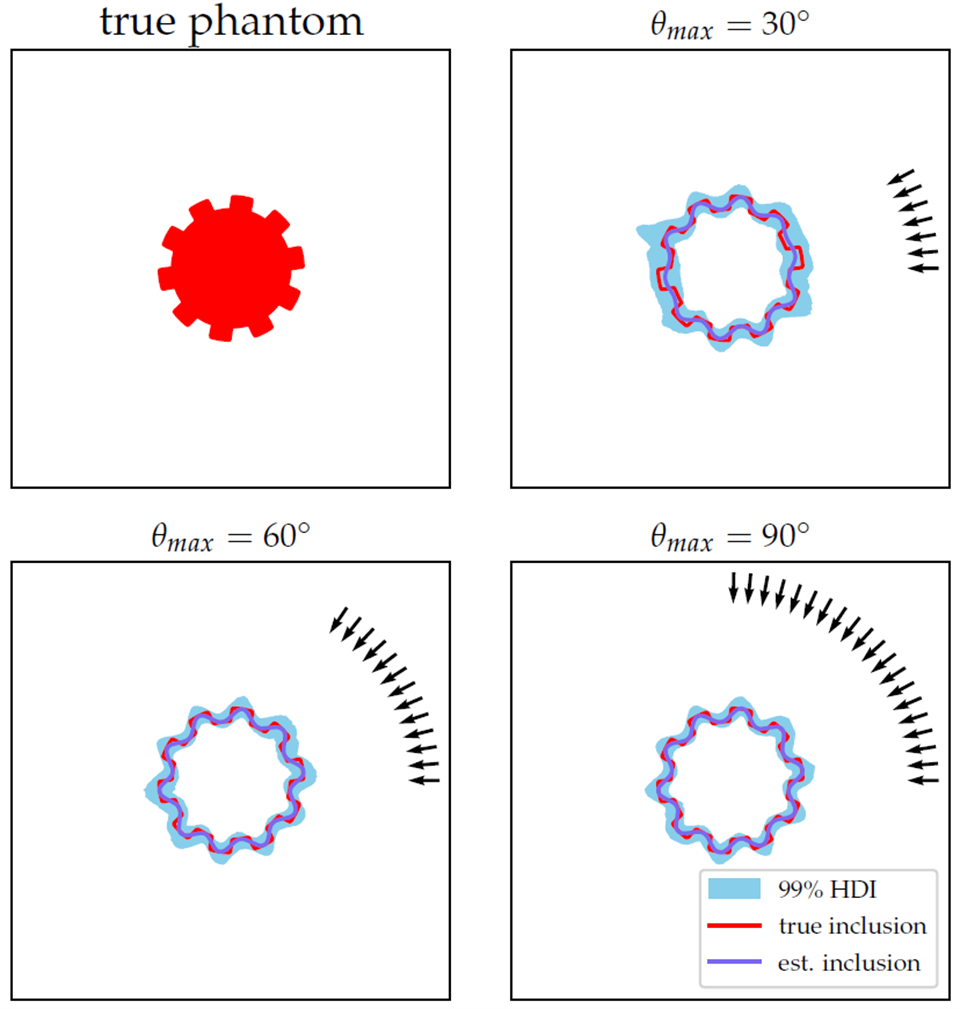
The above plots show the performance of our method in estimating the boundaries of an object in the limited-angle setup with different θmax. The arrows indicate the angles of the X-rays and thus region of the limited-angle interval [0, θmax). The estimated boundaries are shown in dark blue color, and the light blue region indicates the uncertainty in this estimation. The smaller the θmax the larger the uncertainty region - which is consistent with the results from microlocal analysis.
For more details, see the SIAM/ASA paper by Afkham, Dong & Hansen (2023) and the paper in J Math Imaging Vis by Afkham, Riis, Dong & Hansen (2024).
Defect Detection in X-Ray CT of Subsea Pipes
X-ray computed tomography (CT) is used to monitor the condition of subsea oil or gas pipes in operation, in order to detect defects that might cause leaks. In this example, we use data obtained in the test facilities at FORCE Technology. Computations are done with our CUQIpy software which draws upon the Core Imaging Library (CIL) for the CT models.
We formulate a Bayesian inverse problem with built-in defect detection. The goal is to detect defects and quantify their uncertainties. We express the CT problem as y = A (x+d) + e, where y is the measured X-ray absorption, e is data noise, and A is the linear forward model representing the physics and geometry of the measurements. We use a novel representation x + d of the unknown image to be reconstructed, expressed as a sum of two images; x contains the pipe structure and d contains potential defects.
In the Bayesian setting we formulate the joint posterior distribution p(x,d | y) ∝ p(y | x,d) p(x) p(d), where p(x,d | y) is the joint posterior distribution representing the solution to the CT problem, p(y | x,d) is the likelihood that represents the data misfit, while p(x) and p(d) are prior distributions representing any knowledge we have about the unknown images.
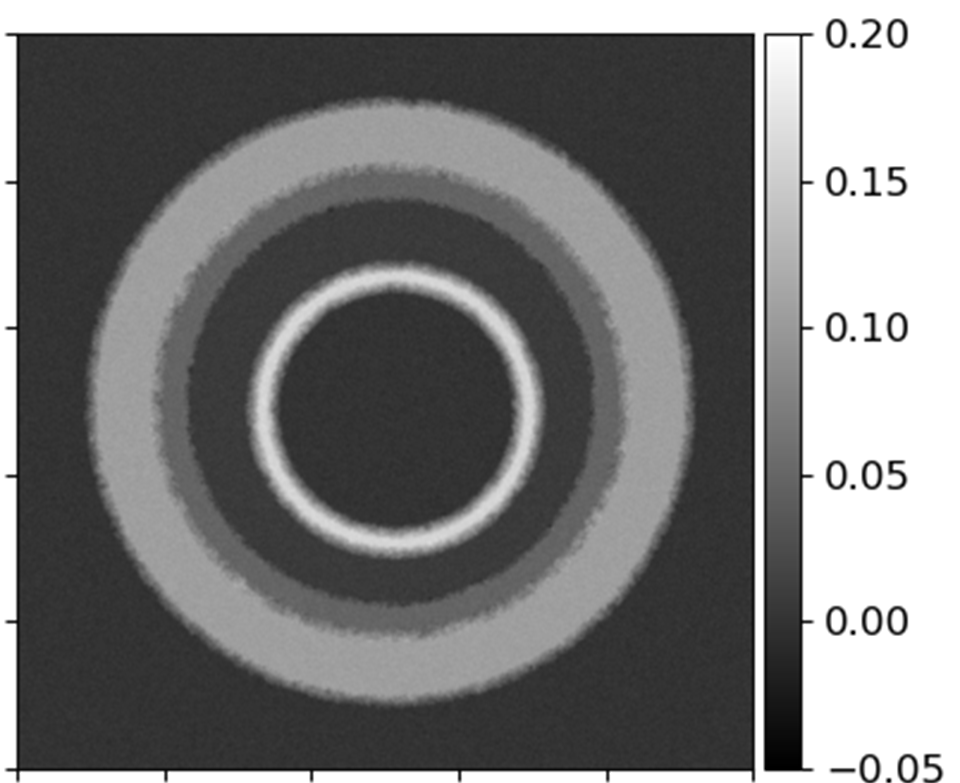
We impose priors that promote the structures we are looking for. For the pipe structure x, we use the structural Gaussian prior proposed by Christensen, Riis, Uribe & Jørgensen (2023). The above figure shows a sample from this prior which promotes the known layered pipe structure. We expect small and few defects, and therefore we impose a prior that promotes both sparsity and correlation (a gamma Markov random field) in the defect image d as described in the paper by Christensen, Riis, Pereyra & Jørgensen (2023). We explore the conditional posterior distributions p(x | y,d) and p(d | y,x) using Gibbs sampling.
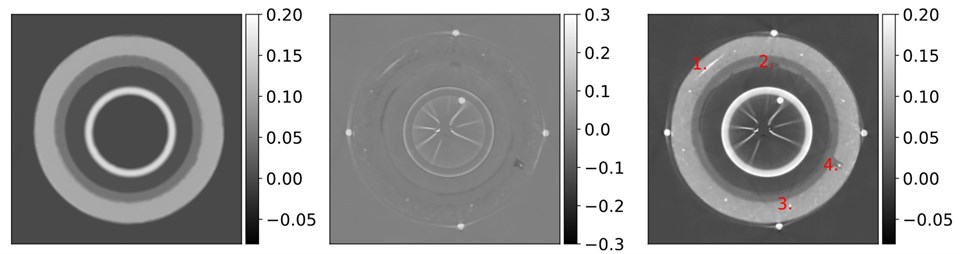
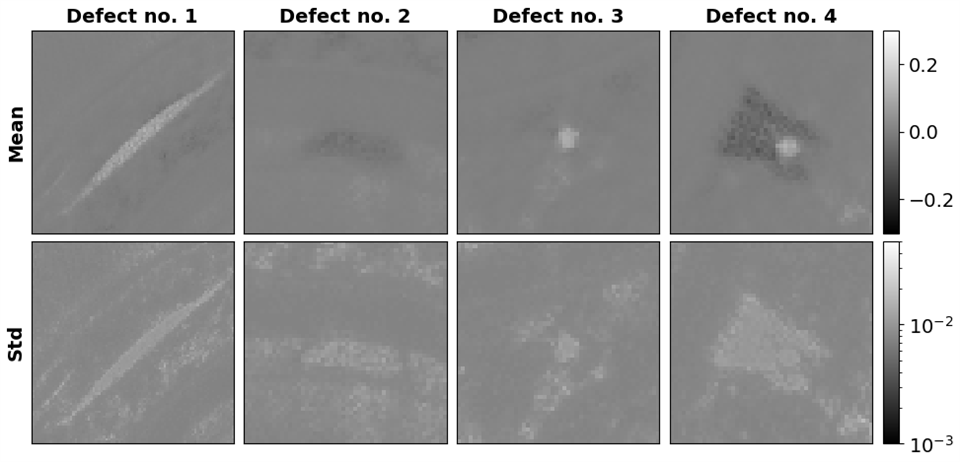
The figure above shows the means of the x-samples (left), the d-samples (middle), and their sum with annotation (right). These results indicate that our methodology has successfully separated the defects from the overall pipe structure. In the figure below we zoom-in on the defect reconstruction d for the annotated defects indicated in the figure above, for further investigation of these defects. The figure shows the mean of the posterior samples, as well as related UQ in the form of the standard deviation of the samples. Engineers can use these results to identify critical defects in the subsea pipes.
This is joint work with Prof. Marcelo Pereyra from Heriot-Watt University. The example was created by PhD student Silja L. Christensen.
Bayesian Inference with Constraints
In many applications, the reconstruction must satisfy certain constraints, e.g., material densities are positive, image intensities are between 0 and 1, or the energy of a signal is bounded. Adding such prior information to a Bayesian model improves the meaningfulness of the resulting posterior distribution.
A common method to model constraints in a prior distribution is truncation: choose an unconstrained prior distribution and remove all probability outside of the constraint set. Another method is to reparametrize the signal, e.g., if the signal x is assumed to be positive, then it can be written as x = exp(z) and one can use an unconstrained prior distribution for z. These methods focus on the interior of the constraint set, but sometimes the signals of interest lie on the boundary of the constraint set.
As an alternative, one can first sample from an unconstrained posterior distribution and then apply a suitable projection onto a convex constraint set C. The resulting implicit posterior will consist of the original density in the interior of the constraint set, and a “lower-dimensional” distribution on the boundary, see the illustration below.
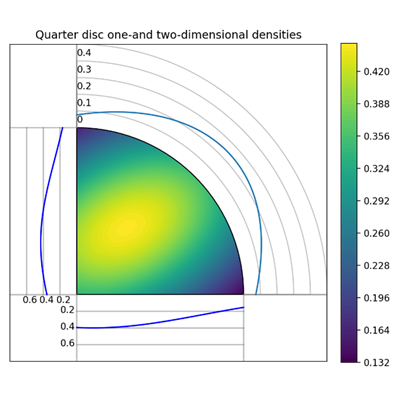

If the forward model is linear and both the likelihood and prior are Gaussian distributions, then the unconstrained sampling and projection can be done in a single step by repeatedly solving randomized constrained linear least square problems of the form
minx∈C || A x - bs ||22 + α || x - cs ||22 ,
where bs and cs are samples from suitable distributions. The solutions to these optimization problems will be samples of a projected posterior.
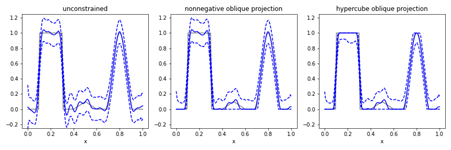
Consider the problem of deblurring a noisy 1D signal with prior knowledge that the signal lies in the interval [0,1]. The figure above shows the pointwise median and 99% credible interval for such a problem using no constraints (left), only the nonnegativity constraint (middle), and the box constraint (right). The projection framework significantly improves the quality of the median near the boundary.
This feature is now available in our CUQIpy software.
See the SIAM-ASA paper Everink, Dong & Andersen (2023).
The Horseshoe Prior for Edge-Preserving Reconstruction
If we want to reconstruct an image with sharp edges, we can use a Cauchy or Laplace distribution of the difference between neighbor pixels as the prior (this is related to total variation regularization). Unfortunately, these priors are computationally demanding. As a computationally attractive alternative, we can use a so-called horseshoe prior that resembles the Cauchy and Laplace priors - see the figure below where the horseshoe prior's density is guaranteed to lie in the shaded band.
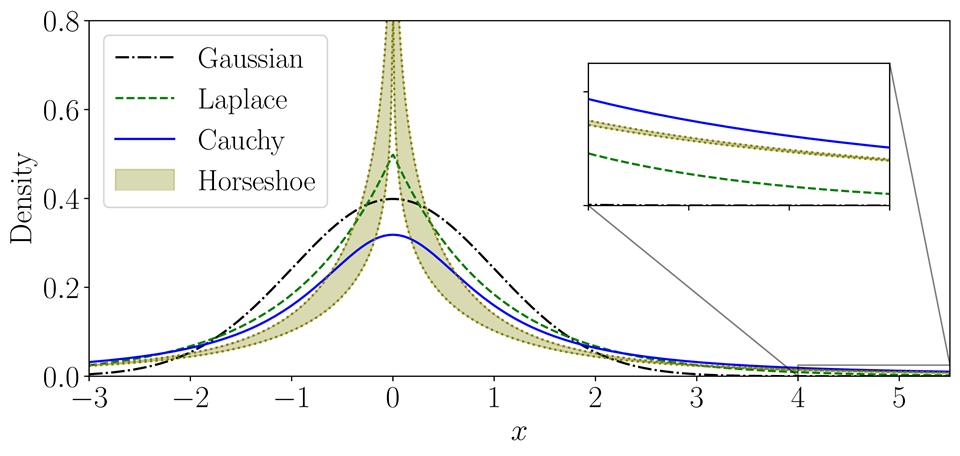
The main advantage of the horseshoe prior is that it imposes a conditionally Gaussian distribution on the differences, which allows more efficient computations because Gaussians can be handled with efficient least-squares methods. The difficulty is that the horseshoe prior has hyperpriors with heavy tails, and to alleviate this issue we propose an extended horseshoe prior that uses a scale-mixture representation of the heavy-tailed hyperpriors.
For the posterior, we exploit the extended horseshoe prior to compute conditional distributions for the associated parameters that can be sampled in closed form due to conjugacy. This allows the application of a Gibbs sampler.
Here we illustrate our method with a 1D deconvolution problem for two different noise levels, and we compare with posterior statistics obtained with a Laplace-difference prior proposed by Uribe, Bardsley, Dong, Hansen & Riis (2022). Compared to the Laplace-difference prior, we see that the horseshoe prior gives a sharper posterior (dotted lines) and a lower posterior uncertainty (the shaded area shows the 95% credibility interval). The solid line shows the ground truth.
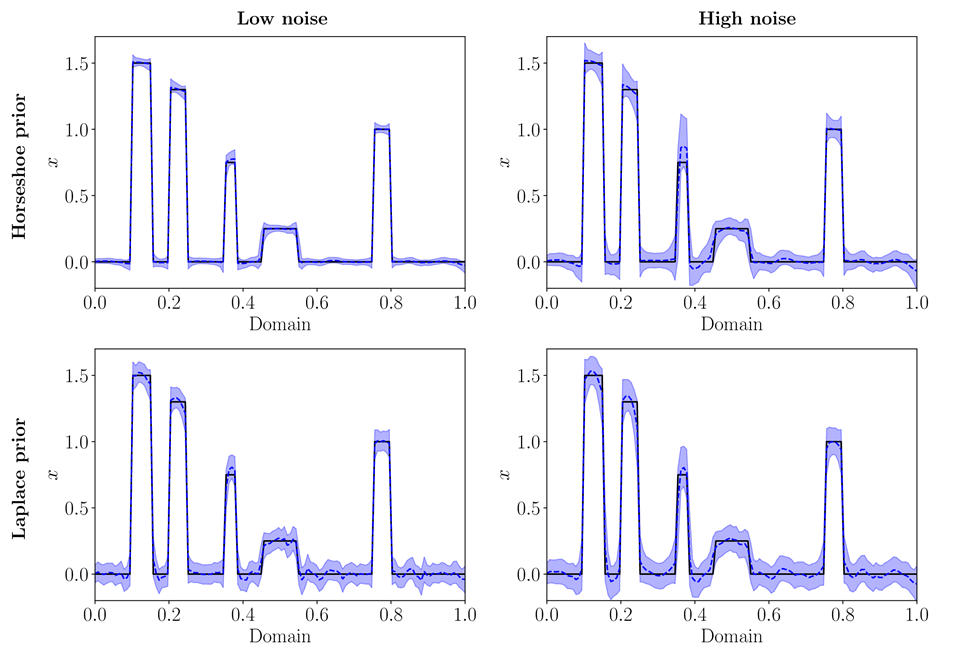
The horseshoe prior originated in the statistical community, and here we introduce it in the setting of Bayesian inverse problem - see the paper by Uribe, Dong & Hansen (2023).
Dimension Reduction for High-Dimensional Problems
A persistent challenge is efficient sampling of high-dimensional posteriors. Using a bigger/faster computer might help, but the breakthrough comes from the use of clever mathematical models and methods.
Rafael Flock developed a novel method using certified coordinate selection that focuses on those solution components that contribute the most to the update from the prior to the posterior. After identification of these components, a dimension-reduced posterior approximation is constructed by replacing the likelihood function by a ridge approximation that only lives in the much lower dimensional space of the selected coordinates; thus saving substantial computational work.
The method is illustrated with an example from super-resolution microscopy where the goal is to compute accurate positions of fluorescence photoactivated molecules, via application of stochastic optical reconstruction microscopy (STORM). The image below shows the data (photon counts) in the form of a blurred image of the molecules.
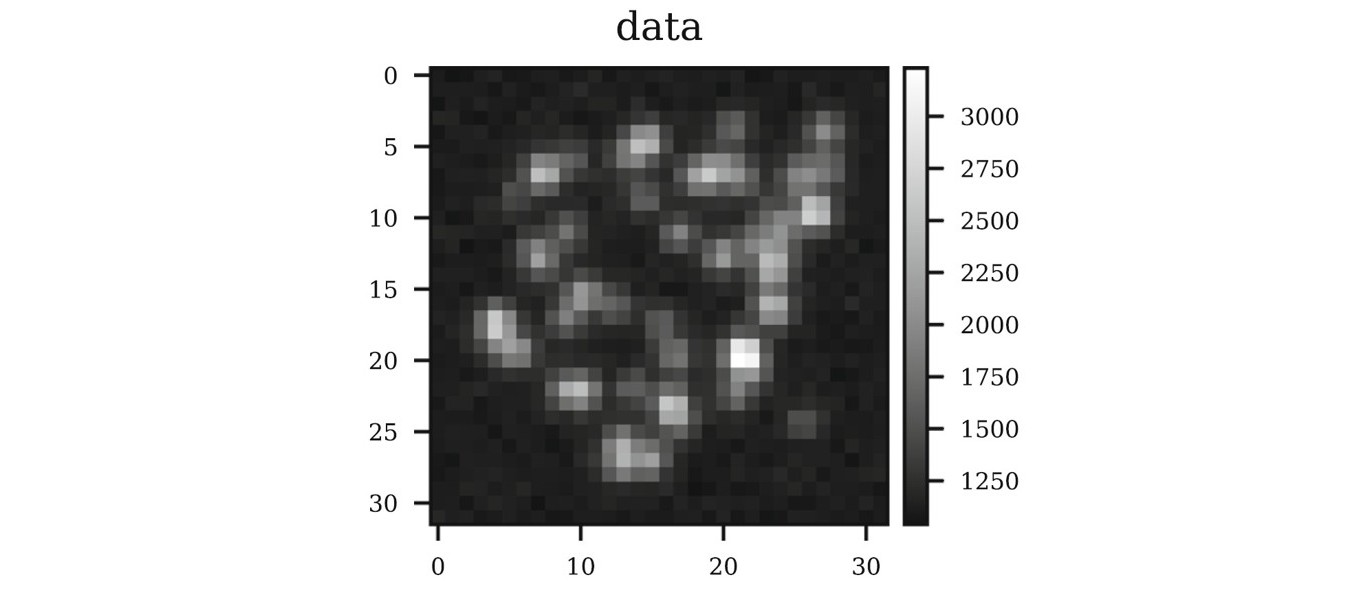
The next two images show the true molecule positions (white dots) superimposed on 1000 coordinates (red dots) that were selected using the certified coordinate selection method and the 99% credible intervals (CI) obtained via MCMC simulation on the dimension-reduced posterior in log10-scale for better visibility.
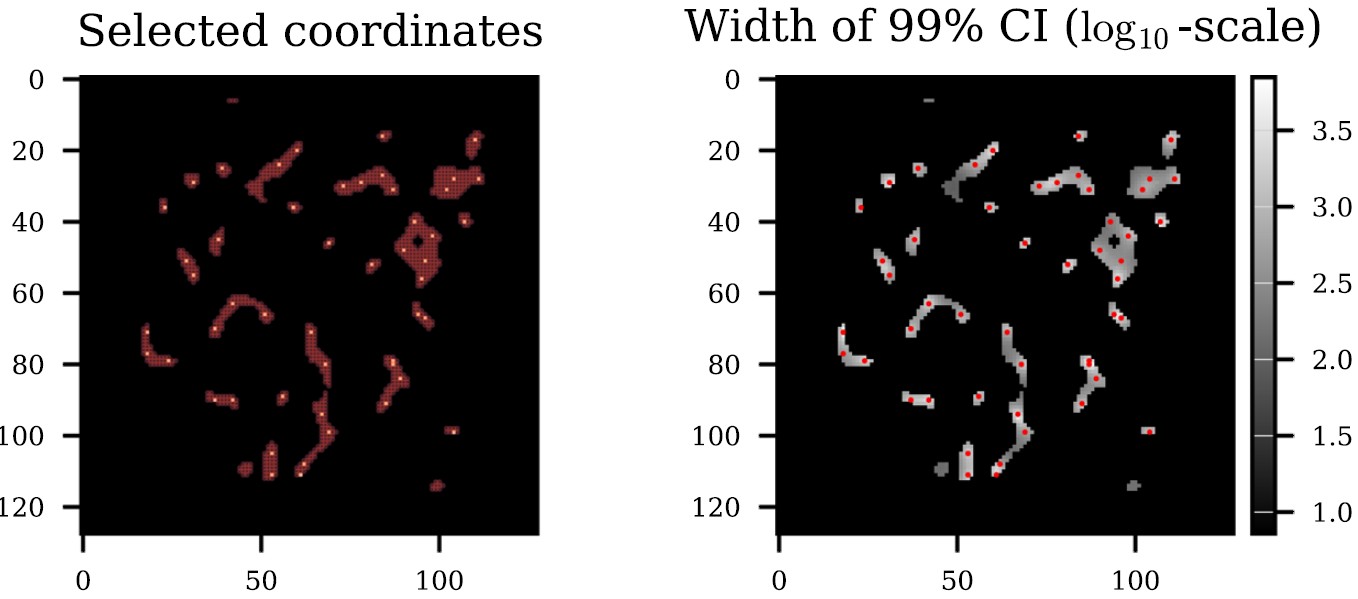
This work is described in a paper by Flock, Dong, Uribe & Zahm.
Bayesian Inversion with Collision Physics for Tokamak Plasma
Nuclear fusion can potentially deliver steady and safe power without causing global warming.
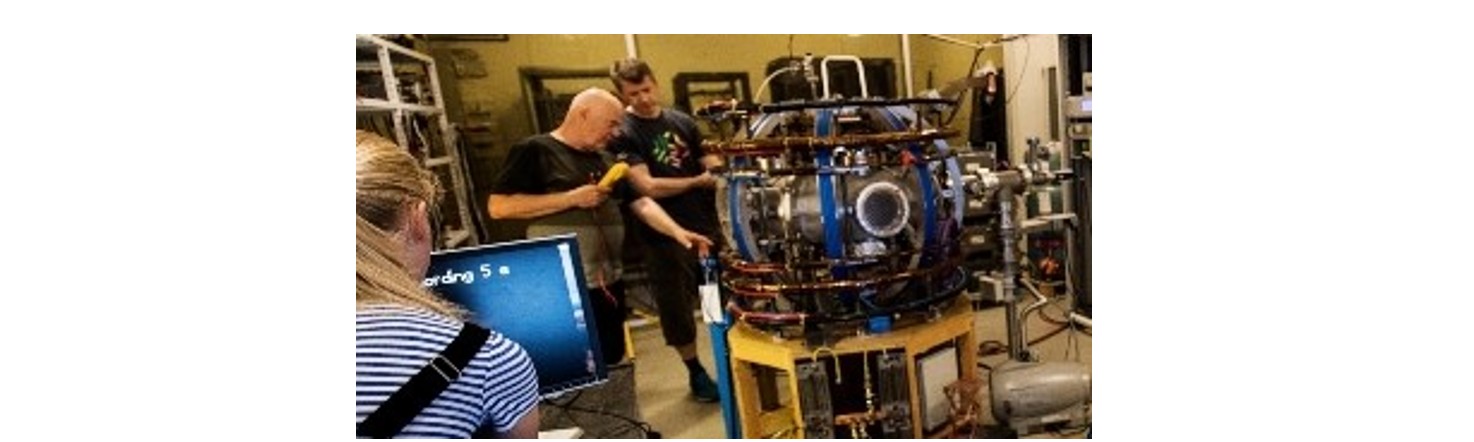
A tokamak reactor (such as DTU's NORTH seen above) uses a magnetic field to confine plasma where energy is produced through fusion. To monitor the plasma, we compute the velocity distribution of the plasma ions via solving a tomography problem using measurements of Doppler shift of photons generated in the plasma.
To solve the corresponding inverse problem, we impose a prior that expresses to actual physics of the ions being slowed down due to collisions inside the plasma. This is done by expressing the solution – i.e., the velocity distribution – in terms of basis functions that represent the collision physics.
In the Bayesian setting of the inverse problem we show (see these slides) that the solution’s covariance matrix is always given by C ∝ Ψ ΨT, where Ψ is matrix whose columns are the basis vectors that represent the collision physics. This allows us to determine the localized correlations in the velocities. In an energy-pitch (E,p) system we see that for a lower energy the correlation in pitch increases, see the figure below.
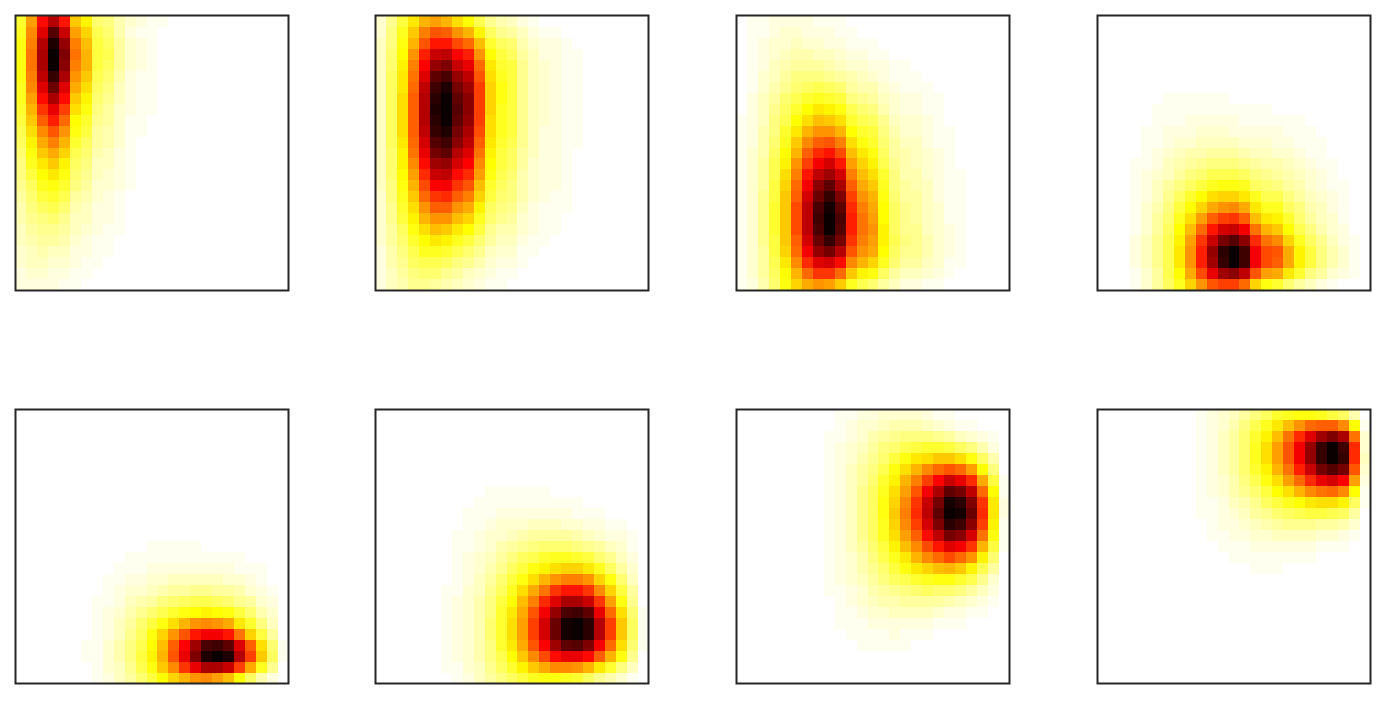
This collaboration involves, among others, Y. Dong and P. C. Hansen from CUQI, Prof. M. Salewski and postdoc Mads Rud Larsen from DTU Physics, and postdoc B. S. Schmidt from UC Irvine.
Fast Computational Gaussian Processes with Monotonicity Constraints
The Gaussian Process (GP) is widely used as a surrogate model, and prior knowledge such as monotonicity can improve model fidelity. But incorporating monotonicity constraints is a computationally challenging task for large-scale problems.
We developed a novel framework for building GP models with monotonicity constraints, based on the Regularized Linear Randomize-Then Optimize (RLRTO) methodology. A Python implementation is provided and it can be easily applied to a wide range of problems.
We illustrate our new method with a Susceptible-Infected-Removed epidemic model governed by a system of ODEs. The solution is monotonic with respected to time and reproduction number (a measure of the disease's ability to spread). We use the GP model to interpolate 64 randomly located measurement, and the figure below shows that the constrained model computed with RLRTO is superior to an unconstrained model as well as two existing approaches approaches based on the No U-Turn Sampler (NUTS) methodology.

The work is described in the manuscript by Zhang, Everink, and Jørgensen. The software is available at zenodo.org/records/15807485.
How Does Data Noise Propagate in Iterative Methods?
When we use iterative methods to solve inverse problems, they exhibit semi-convergence. During the initial iterations we approach the desired reconstruction, but at some stage inverted data noise starts to dominate, and this is where we terminate the iterations. The iterative method thus exhibits regularization. To analyze this semi-convergence, we split the reconstruction error into a sum of two components:
- An iteration error associated with noise-free data, whose decay is well understood from convergence analysis.
- A noise error associated with the inverted data noise; we observe that this error increases but we cannot prove this.
Inspired by the UQ paradigm, we use a statistical approach to describe the growth of the noise error. We derive a closed-form expression for the noise error's expected value and prove that it increases monotonically. In this statistical framework, we thus show that semi-convergence can be expected for many popular iterative methods.

The figure illustrates our analysis for the Landweber method applied to the inverse heat equation. The thin red lines are the reconstruction errors for 10 different noise realizations; all of them exhibit semi-convergence. The thick black line is the expected value of the reconstruction errors, and it is the sum of the iteration error and the expected value of the noise errors.
This work is described in the paper by Hansen that appeared in a special issue of Lin. Alg. Appl. and the paper by Hansen & Hochstenbach that appeared in a special issue of BIT Numerical Mathematics.
The Team
All members of the CUQI team are associated with the Section for Scientific Computing at DTU Compute.
Permanent Team Members

Martin Skovgaard Andersen Head of Section, Associate Professor mskan@dtu.dk
Yiqiu Dong Associate Professor yido@dtu.dk
Specialist in noise modeling and computational methods for image processing.
Per Christian Hansen Professor pcha@dtu.dk
Specialist in numerical analysis, iterative solvers, and computational methods for inverse problems.
Jakob Sauer Jørgensen Associate Professor jakj@dtu.dk
Mirza Karamehmedovic Associate Professor mika@dtu.dk
Kim Knudsen Professor kiknu@dtu.dk
Specialist in coupled-physics modeling, PDE-constrained optimization, functional analysis and electrical impedance tomography.
Dorte Olesen Consultant, PhD, DSc doole@dtu.dk
Executive advisor and project coordinator.
Postdocs
Chao Zhang Postdoc chaz@dtu.dk
Project: goal-oriented UQ.
Now assistant professor with Dept. of Mathematical Sciences, Univ. of Oulu. Personal homepage.

Project: optimization-based sampling in Bayesian inverse problems.
Now postdoc at the University of Eastern Finland.
Personal homepage.
Project: discretization methods for computed tomography.
Now with IDea Lab, University of Graz; personal homepage.
Project: sampling strategies in Bayesian inversion.
Now with EDF Research and Development, France.
Project: efficient and flexible computational methods.
Now works with software development at Copenhagen Imaging; personal homepage.

Project: non-Gaussian priors.
Now with Danfoss Leanheat, Finland; personal homepage.
PhD Students
Lara Baalbaki
Dec. 1, 2022 to Nov. 30, 2025.
Project: Bayesian inference for inverse problems with sampling conditioned on functionals.
Thesis: Stochastic Inverse Source Problems: Stability, Correlation-Based Data, and Multi-Resolution Methods.
Lara was a research assistant in CUQI December 2025-March 2026. She is now working freelance from Beirut.
Katrine O. Bangsgaard
Sept. 1, 2019 to June 30, 2023 (incl. parental leave).
Project: prior modeling in computational UQ for inverse problems.
Katrine is now a Senior Modelling Scientist with Novo Nordisk Research & Development.
Silja Lønborg Christensen
August 1, 2020 to May 27, 2024 (incl. parental leave).
Project: UQ for tomographic reconstruction.
Silja was a research assistant in CUQI June-October 2024. She is now a geophysicist with COWI, Denmark.
Jasper Marijn Everink
Oct. 1, 2021 to Sept. 30, 2024.
Project: Computational Uncertainty Quantification for Inverse Problems with Implicit Priors.
Thesis: Uncertainty quantification for inverse problems with sparsity-promoting implicit priors.
After working as a postdoc in CUQI for one year (2024-2025), Jasper is now postdoc at the University of Eastern Finland
Rafael Flock
Oct. 1, 2021 to Sept. 30, 2024.
Project: Dimensionality challenges in UQ for inverse problems.
Thesis: Dimension reduction methods for Bayesian inversion with applications in image reconstruction.
Rafael was a postdoc in CUQI October-December 2024. He is now with WTM Engineers in Hamburg.
Andreas Horst
June 1, 2022 to May 31, 2025.
Project: UQ with Besov priors.
Thesis: Inverse Problems with Besov Priors.
Kristoffer Linder-Steinlein
Feb. 1, 2021 to Jan.31, 2024.
Project: UQ for source localization and passive imaging in random media.
Thesis: Uncertainty quantification for source localization and passive imaging in random media.
Kristoffer was postdoc 2024-2025 in the Villum Experiment project neXt-Ray: a super-resolution light engine. He is now with the insurance group If Skadeforsikring.
Aksel Kaastrup Rasmussen
Sept. 1, 2020 to Aug. 31, 2023.
Project: computational UQ of hybrid inverse problems.
Thesis: On deterministic and statistical consistency for nonlinear inverse problems.
Aksel was a research assistant in CUQI November-December 2023. He is now a Principal Biostatistician with H. Lundbeck A/S.
Collaborators

Assistant Professor Babak M. Afkham, assistant professor, Mathematical Sciences, University of Oulu - specialist in goal-oriented UQ and PDE-based inverse problems.

Consultant Amal Alghamdi, founder of Impack Alif - specialist in scientific software and UQ for PDE-based inverse problems.

Professor Johnathan M. Bardsley, Department of Mathematical Sciences, University of Montana - specialist in computational methods for inverse problems and uncertainty quantification.


Associate Professor Matthias Chung, Department of Mathematics, Emory University - specialist in computational inverse problems, data analytics & learning, uncertainty quantification, and numerical optimization.

Professor Bangti Jin, Department of Mathematics, Chinese University of Hong Kong - specialist in theory and algorithms for inverse and ill-posed problems.
Jakob Lemvig Associate Professor jakle@dtu.dk

Professor Marcelo Pereyra, Maxwell Institute for Mathematical Science and School of Mathematical and Computer Sciences, Heriot-Watt University - specialist in statistical, analytical and machine-learning paradigms.

Software Development Manager Nicolai A. B. Riis, Copenhagen Imaging - specialist in scientific software.

Professor Tanja Tarvainen, Department of Applied Physics, University of Eastern Finland - specialist in computational methods for inverse problems and uncertainty quantification in imaging applications

Research Professor Faouzi Triki, Laboratoire Jean Kuntzman, Grenoble-Alpes University - specialist in inverse problems and mathematical modeling in optics.

Data scientist Felipe Uribe, Danfoss Leanheat, Finland - specialist in applied probability & statistics, and large-scale sampling methods.

CUQI Perspectives
On June 9-10, 2026 we held the final CUQI Workshop at DTU with 23 participants. We gathered almost every participant of the project, and many of them talked about their contributions to CUQI and their recent work. In addition, we had invited talks from three of our collaborators: Olivier Zahm (INRIA-Grenoble), Bangti Jin (Chine Univ. of Hong Kong), and Jean-Christophe Pesquet (INRIA Paris-Saclay). The workshop gave a nice overview of many different aspects of the project, as well as inspiration for future projects.

Courses, Workshops, Training and Other Activities
Conference participation in 2025
CUQI presence at international conferences.
ENUMATH, Heidelberg, Sept. 1-5
CUQI was well represented at the ENUMATH 2025 conference in Heidelberg, with 700+ participants.

Per Christian Hansen arranged a minisymposium Iterative Methods for Regularization of Large-Scale Inverse Problems with focus on computational aspects as well as the underlying theory. He talked about new statistical insight into semi-convergence of such methods. The other three speakers were Iveta Hnětynková (Charles Univ., Prague), Alessandro Buccini (Cagliari Univ., Sardinia), and Malena Sabaté Landman (Oxford Univ.).
In other minisymposiums, Yiqiu Dong talked about Sampling Strategies in Sparse Bayesian Inference and Kim Knudsen talked about Electrical Impedance Tomography with Level Sets and Sparsity. Former postdocs Babak Afkham and Richard Huber talked about Goal-Oriented UQ for Exploring Ocean Floor with Acoustic Waves and Weighted Strip Models: L2 Optimal Discretizations of Tomographic Operators, respectively.
Joint Statistical Meetings (JSM) 2025, Nashville, August 2-7

Invited paper presentation by Jasper M. Everink, Sparse Bayesian Inference with Regularized Gaussian distributions.
Applied Inverse Problems (AIP) 2025, Rio de Janeiro, July 28 - August 1

Poster presentation by Lara Baalbaki, Stability estimates of a stochastic inverse source problem for a class of elliptic multipliers - received an honorable mention. Minisymposium talk by Amal Alghamdi, Bayesian Inversion of CT Data to Characterize Transport in the Mouse Ear.
Waves and Imaging in Complex Media (wicom), Paris, June 10-13
Invited talk by Kim Knudsen, Practical Electrical Impedance Tomography with Partial Data.
SSVM 2025, 10th International Conference on Scale Space and Variational Methods in Computer Vision, Devon, UK, May 18-25

Talks by Richard Huber, A Novel Interpretation of the Radon Transform's Ray- and Pixel-Driven Discretizations under Balanced Resolutions and Jasper M. Everink, Selp-Supervised Conformal Prediction for Uncertainty Quantification in Imaging Problems.
SIAM Conference on Computational Science and Engineering (CSE25), Fort Worth, March 3-7


Minisymposium talks by Amal Alghamdi, Computational Uncertainty Quantification for Inverse Problems in Python and Chao "Charlie" Zhang, Efficient Sampling in Linear Inverse Problems with Hierarchical Matrices.
Finnish Inverse Days 2024 Conference
December 2024 @ University of Oulu

CUQI was well represented at the Finnish Inverse Days 2024 Conference in Oulu.
Postdoc Chao "Charlie" Zhang talked about "Gaussian Processes under Shape Constraints" and Postdoc Jasper Everink talked about "The Geometry and Well-Posedness of Sparse Regularized Linear Regression".
PhD student Lara Baalbaki talked about "Stability estimates and numerical solution of a stochastic inverse source problem for a class of elliptic multipliers" and PhD-student Andreas Horst gave a lightning talk on "Image decomposition using Besov priors".
Workshop: UQ for Inverse Problems and Imaging (UQIPI24)
September 16-20, 2024 @ ICMS, Bayes Centre, Edinburgh
Organizers: Per Christian Hansen, Marcelo Pereyra, and Yiqiu Dong. Link to workshop homepage: UQIPI24.
![]()
This workshop brought together specialists in UQ for inverse problems and imaging, with talks about the development of theory, methodology, and software as well as applications of UQ in imaging. We also gave a training course on our CUQIpy software, including hands-on tutorials. We had a total of 60 participants.
Plenary Speakers
- Yoann Altmann, Heriot-Watt University
- Tatiana Bubba, University of Bath
- Per Christian Hansen, Technical University of Denmark
- Aku Seppänen, University of Eastern Finland
- Julián Tachella, CNRS and ENS de Lyon
- Faouzi Triki, Grenoble-Alpes University
PhD course: Introduction to Bayesian Inverse Problems
June 2024 @ DTU

The course introduced state-of-the-art numerical methods for quantification and reduction of uncertainties in computational models. UQ is paramount to enhance analysis and prediction tasks in multiple applications such as tomography, material science, spatial statistics, reliability, etc. The course provided the mathematical background for theory and methods of UQ, illustrated via Python exercises. We will also covered the use of the software package CUQIpy for performing UQ analysis.
Ects: 5.
Time: June 6–26, 2024 (3 week period at DTU).
Course responsible: Associate Professor Yiqiu Dong, DTU Compute.
More details: Link to DTU's course description, course no. 02975.
Second Place in the Kuopio Tomography Challenge 2023
December 15, 2023 @ LUT University

Team CUQI won shared second place in the international Kuopio Tomography Challenge 2023, which provides real electric impedance tomography data and asks participants to develop the best numerical methods to reconstruct the probed conductivity field. The team consists of three DTU master’s students Martin S. Carøe, Jakob T. K. Nielsen, and Rasmus K. H. Sørensen, plus CUQI project members Jasper Everink, Aksel Kaastrup Rasmussen, Amal Alghamdi, Chao Zhang, Jakob Sauer Jørgensen, and Kim Knudsen.
Team CUQI submitted several methods including spatially dependent regularization, level-set method, and non-linear optimization, in conjunction with Otsu and Chan-Vese segmentation methods. They scored the highest among the teams that did not rely on machine learning solutions. The team presented their work during the Inverse Days 2023 conference at LUT University in Lahti, Finland. The submissions are on CUQI's GitHub in KTC2023-CUQI1 to KTC2023-CUQI9. We acknowledge support from CUQI and the Danish Data Science Academy.
CUQIpy Training Course
December 7-8, 2023 @ DTU

We held a two-day training course at DTU, with 30 participants, aimed at introducing the CUQIpy software to new users. After a brief introduction to UQ for inverse problems, we described the CUQIpy interface that allows users to easily model and analyze linear and nonlinear inverse problems. This was followed by computer exercises and work on a small project. The program, course material, etc. is available at this link.
Talk: Per Christian Hansen - Edge-Preserving Computed Tomography (CT) with Uncertain View Angles
Professor Per Christian Hansen gave an invited to talk on Feb. 7, 2023 in the online seminar series MATH4UQ organized by RWTH Aachen University. Here are the slides and a YouTube video.
Workshop: Imaging with Uncertainty Quantification (IUQ22)
September 27-29, 2022 @ Helsingør, Denmark



This workshop brought together specialists in UQ for imaging, and the talks covered various aspects related to the development of theory, methodology and software, as well as applications of UQ in imaging. The goal was to stimulate networking and collaboration between researchers and students in these areas.
Before the workshop, we arranged a 1-day short course devoted to the Python software CUQIpy that we are currently developing for modeling and computations related to UQ for imaging.
For more details about the workshop, go to the IUQ22 Workshop homepage.
Talk: Felipe Uribe - Bayesian Inverse Problems
Postdoc Felipe Uribe was invited to talk about Bayesian inverse problems at the "Summer School on Recent Advancements in Computational and Learning Methods for Inverse Problems" (CLIP22), July 11–15: https://bugs.unica.it/cana/clip22/
Talk: Jakob Sauer Jørgensen - CUQIpy
Senior researcher Jakob Sauer Jørgensen was invited to talk about the software package CUQIpy at the "CIMPA Summer School 2022 Mathematical Methods in Data Analysis", July 18–29: https://sites.google.com/view/mathschoolinalbania/
PhD course: Introduction to Uncertainty Quantification for Inverse Problems
January 2022 @ DTU
This course introduces state-of-the-art numerical methods for quantification and reduction of uncertainties in computational models. UQ is paramount to enhance analysis and prediction tasks in multiple applications such as tomography, material science, spatial statistics, reliability, etc. Therefore, the course can be of interest to students from any discipline in applied mathematics and engineering. The course provides the mathematical background for theory and methods of UQ, which are illustrated via Python exercises. We will also cover the use of the software package CUQIpy for performing UQ analysis.
Ects: 5.
Time: January 3–22, 2022 (3 week period at DTU).
Course responsible: Associate Professor Yiqiu Dong, DTU Compute.
PhD course: Bayesian Scientific Computing
December 2019 @ DTU
The lectures focus on basic techniques in Bayesian methods, including probability distributions, Bayes' formula, conditioning, hierarchical models, estimation problems arising in this context, as well as certain numerical techniques for inverse problems, including regularization and iterative methods for solving large systems. The course is based on the book: D. Calvetti and E. Somersalo, Introduction to Bayesian Scientific Computing, Springer, 2007, as well as a new edition of it.
Time: December 9-13, 2019 (one full week).
Teachers: Professor Daniela Calvetti and Professor Erkki Somersalo, both from Case Western Reserve University, Cleveland, Ohio.
Course responsible: Professor Per Christian Hansen, DTU.
Workshop: Uncertainty Quantification for Inverse Problems
December 17-18, 2018 @ DTU
The goal of this workshop was to give the participants an introduction to the central ideas and computational methods for uncertainty quantification, with a focus on its application to inverse problems, and with illustrations from applications. The workshop is aimed at newcomers in the field, but more experienced user will also benefit from the presentations. Workshop homepage with slides etc.
Our interns
- Louis Poulain-Auzéau from EPFL, Switzerland: Neural networks for acoustic and electromagnetic field control. Worked with weather forecasting and is now a PhD student at ETH Zürich.
- Marco Ratto, Università de Cagliari, Italy: Implementation of fast convolution algorithms in CUQIpy. Currently a PhD student at Università dell'Insubria in Como.
- Tania Andreea Goia, University of Hamburg and Naoki Sakai, University of Tokyo: Uncertainty quantification benchmarking in CUQIpy. Naoki Sakai is accepted as a PhD student at Stanford University.
PUBLICATIONS
Here we list submitted and published papers produced in the CUQI project.
- B. M. Afkham and A. Carpio, Simultaneous estimation of seabed and its roughness with longitudinal waves, submitted to SIAM J. Sci. Comput.
- B. M. Afkham, J. Chung, and M. Chung, Learning regularization parameters of inverse problems via deep neural networks, Inverse Problems, 37 (2021), 105017, doi 10.1088/1361-6420/ac245d.
- B. M. Afkham, J. Chung, and M. Chung, Uncertainty quantification for goal-oriented inverse problems via variational encoder-decoder networks, Inverse Problems, 40 (2024), 075010, doi 10.1088/1361-6420/ad5373 (open access).
- B. M. Afkham, Y. Dong, and P. C. Hansen, Uncertainty quantification of inclusion boundaries in the context of X-ray tomography, SIAM/ASA J. Uncertainty Quantification, 11 (2023), pp. 31-61, doi 10.1137/21M1433782.
- B. M Afkham, K. Knudsen, A. K. Rasmussen, and T. Tarvainen, A Bayesian approach for consistent reconstruction of inclusions, Inverse Problems, 40 (2024), 045004, doi 10.1088.1361-6420/ad2531 (open access).
- A. M. Afkham, N. A. B. Riis, Y. Dong, and P. C. Hansen, Inferring object boundaries and their roughness with uncertainty quantification, J Math Imaging Vis, 66 (2024), pp. 977-992, doi 10.1007/s10851-024-01207-9.
- A. M. A. Alghamdi, M. S. Carøe, J. M. Everink, J. S. Jørgensen, K. Knudsen, J. T. K. Nielsen, A. K. Rasmussen, R. K. H. Sørensen, and C. Zhang, Spatial regularization and level-set methods for experimental electrical impedance tomography with partial data, Appl. Math. Modern Chal., 2 (2024), pp. 165-186, doi 10.3934/ammc.2024013 (open access).
- A. M. A. Alghamdi, M. A. Hesse, J. Chen, and O. Ghattas, Advancing aquifer characterization through the integration of satellite geodesy, geomechanics, and Bayesian inference, ESS Open Archive, 2024, doi.org/10.22541/essoar.172988076.62528060/v1 (open access).
- A. M. A. Alghamdi, B. K. Mathiesen, L. Miyakoshi, M. Nedergaard, J. S. Jørgensen, P. A. R. Bork, Cochlear aqueduct advection and diffusion inferred from computed tomography imaging with a Bayesian approach, Journal of the Association for Research in Otolaryngology (2026), doi 10.1007/s10162-026-01047-x (open access).
- A. M. A. Alghamdi, N. A. B. Riis, B. M. Afkham, F. Uribe, S. L. Christensen, P. C. Hansen, and J. S. Jørgensen, CUQIpy – Part II: computational uncertainty quantification for PDE-based inverse problems in Python, Inverse Problems, 40 (2024), 045010, doi 10.1088/1361-6420/ad22e8 (open access). See also Part I by N. A. B. Riis et al. below.
- E. Ametova, G. Burca, S. Chilingaryan, G. Fardell, J. S. Jørgensen, E. Papoutsellis, E. Pasca, R. Warr, M. Turner, W. R. B. Lionheart, and P. J. Withers, Crystalline phase discriminating neutron tomography using advanced reconstruction methods, J. Phys. D: Appl. Phys., 54 (2021), 325502, doi 10.1088/1361-6463/ac02f9 (open access).
- E. Ametova, G. Burca, G. Fardell, J. S. Jørgensen, E. Papoutsellis, E. Pasca, R. Warr, M. Turner, W. R. B. Lionheart, and P. J. Withers, Joint reconstruction with a correlative regularisation technique for multi-channel neutron tomography, Proc.16th International Meeting on Fully 3D Image Reconstruction in Radiology and Nuclear Medicine, pp. 431–434 (2021), doi 10.48550/arXiv.2110.0413 (open access).
- K. O. Bangsgaard and M. S. Andersen, A statistical reconstruction model for absorption CT with source uncertainty, Inverse Problems, 37 (2021), 085009, doi 10.1088/1361-6420/ac11c7.
- K. O. Bangsgaard, M. Andersen, J. G. Heaf, and J. T. Ottesen, Bayesian parameter estimation for phosphate dynamics during hemodialysis, Math, Biosci. Eng., 20 (2022), pp. 4455–4492, doi 10.3934/mbe.2023207 (open access).
- K. O. Bangsgaard, G. Burc, E. Ametova, M. S. Andersen, and J. S. Jørgensen, Low-rank flat-field correction for artifact reduction in spectral computed tomography, Appl. Math. in Sci. Eng., 31 (2023), 2176000, doi 10.1080/27690911.2023.2176000 (open access).
- J. M. Bardsley and P. C. Hansen, MCMC algorithms for computational UQ of nonnegativity constrained linear inverse problems, SIAM J. Sci. Comput., 41 (2020), pp. A1269–1288, doi 10.1137/18M1234588.
- F. Bevilacqua, Y. Dong, and J. S. Jørgensen, Regularized material decomposition for K-edge separation in hyperspectral computed tomography; in L. Calatroni, M. Donatelli, S. Morigi, M. Prato, and M. Santacesaria (Eds), Scale Space and Variational Methods in Computer Vision, SSVM 2023, Springer (2023), doi 10.1007/978-3-031-31975-4_9.
- D. Caviedes-Nozal, F. M. Heuchel, J. Brunskog, N. A. B. Riis, and E. Fernandez-Grande, A Bayesian spherical harmonics source radiation model for sound field control, J. Acoust. Soc. Am., 146 (2019), pp. 3425–3435, doi 10.1121/1.5133384.
- D. Caviedes-Nozal, N. A. B. Riis, F. M. Heuchel, J. Brunskog, P. Gerstoft, and E. Fernandez-Grande, Gaussian processes for sound field reconstruction, J. Acoust. Soc. Amer., 140, 1107–1119 (2021), doi 10.1121/10.0003497.
- Y. Chang, A. Dyregaard, S. V. Holm, M. J. Jørgensen, K. Knudsen, K. Meisner-Jensen, D. D. Nielsen, and M. C. Nielsen, Regualrized Inverse Filtering and Machine Learning Methods for Speech Enhancement - the Helsinki Speech Challenge 2024, Appl. Math. for Modern Challenges, 6 (20259, pp. 45-59, doi 10.3934/ammc.2025017 (open access).
- A. A. Chaudhry, C. Zhang, O. E. Ernst, and T. Nagel, Effects of inhomogeneity and statistical and material anisotropy on THM simulations, Reliable Engineering & System Safey, 260 (2025), 110921, doi 10.1016/ress.2025.110921.
- L. Chen, T. Chen, U. Detha, and M. S. Andersen, Towards scalable kernel-based regularized system identification, 2023 62nd IEEE Conference on Decision and Control (CDC), Singapore, Singapore, 2023, pp. 1498–1504, doi 10.1109/CDC49753.2023.10384051 (open access).
- S. L. Christensen, N. A. B. Riis, M. Pereyra, and J. S. Jørgensen, A Bayesian approach for CT reconstruction with defect detection for subsea pipelines, Inverse Problems, 40 (2024), 025003, doi 10.1088/1361-6420/ad1348 (open access).
- S. L. Christensen, N. A. B. Riis, F. Uribe, and J. S. Jørgensen, Structural Gaussian priors for Bayesian CT reconstruction of subsea pipes, Appl. Math. in Sci. and Eng., 31 (2023), 2224918, doi 10.1080/27690911.2023.2224918 (open access).
- A. Denker, F. Margotti, J. Ning, K. Knudsen, D. N. Tanyu, B. Jin, A. Hauptmann, and P. Maass, Chapter 3 - Deep Learning Based Reconstruction Methods for Electrical Impedance Tomography, in A. Hauptmann, B. Jin, and C.-B. Schönlieb (Eds), Handbook of Numerical Analysis, 26 (2025), pp. 127-175, doi 10.1016/bs.hna.2025.09.003.
- Y. Dong and M. Pragliola, Including sparsity via horseshoe prior in imaging problems, Inverse Problems, 39 (2023), 074001, doi 10.1088/1361-6420/acd851 (open access).
- Y. Dong, C. Wu, and S. Yan, A fast method for simultaneous reconstruction and segmentation in X-ray CT application, Inverse Problems in Science and Engineering, 29 (2021), 3342–3359, doi 10.1080.17415977.2021.1999941.
- O. L. Elvetun, K. Knudsen, and B. F. Nielsen, Fictitious null spaces for improving the solution of injective inverse problems, Inverse Problems, 41 (2025), 015007, doi 10.1088/1361-6420/ad9fa1.
- J. M. Everink Y. Dong, and M.S. Andersen, The geometry and well-posedness of sparse regularized linear regression, Inverse Problems, to appear, arXiv.org/2409.03461.
- J. M. Everink, Y. Dong, and M. S. Andersen, Sparse Bayesian inference with regularized Gaussian distributions, Inverse Problems, 39 (2023), 115004, doi 10.1088/1361-6420/acf9c5 (open access).
- J. M. Everink, Y. Dong, and M. S. Andersen, Bayesian inference with projected densities, SIAM/ASA J. UQ, 11 (2023), pp. 1025–1043, doi 10.1137/22M150695X.
- J. M. Everink, B. Tamo Amougou, and M. Pereyra, Self-supervised conformal prediction for uncertainty quantification in imaging problems; in T. A. Bubba, R. Gaburro, S. Gazzola, K. Papafitsoros, M. Pereyra, and C. B. Schönlieb (Eds), Scale Space and Variational Methods in Computer Vision. SSVM 2025, Springer (2025), doi 10.1007/978-3-031-92366-1_9.
- J. M. Everink, C. Zhang, A. M. A. Alghamdi, R. Laumont, N. A. B. Riis, and J. S. Jørgensen, A computational framework and implementation of implicit priors in Bayesian inverse problems, submitted to ACM Trans. Math. Soft., arXiv.org/2509.11781.
- R. Flock, Y. Dong, F. Uribe, and O. Zahm, Continuous Gaussian mixture solution for linear Bayesian inversion with application to Laplace priors, Inverse Problems, 41 (2025), 065012, doi 10.1088/1361-6420/add6cf (open access).
- R. Flock, Y. Dong, F. Uribe, and O. Zahm, Certified coordinate selection for high-dimensional Bayesian inversion with Laplace prior, Statistics and Computing, 34 (2024) article no. 134, doi 10.1007/s11222-024-10445-1 (open access).
- R. Flock, S. Liu, Y. Dong, and X. T. Tong, Local MALA-within-Gibbs for Bayesian image deblurring with total variation prior, SIAM J. Sci. Comput., 47 (2025), pp. A2127–A2153, doi 10.1137/24M1694781.
- P. C. Hansen, Insight into semi-converence of iterative regularization methods, Lin. Alg. Appl., 2025, doi 10.1016/j.laa.2025.07.036 (open access).
- P. C. Hansen, K. Hayami, and K. Morikuni, GMRES methods for tomographic reconstruction with an unmatched back projector, J. Comp. Appl. Math., 413 (2022), 114352, doi 10.1016/j.cam.2022.114352 (open access).
- P. C. Hansen and M. E. Hochstenbach, On spectral properties and fast initial convergence of the Kaczmarz method, invited paper for BIT Numerical Mathematics special issue celebrating the 90th birthday of Åke Björck, 66, article no. 8 (2026), doi 10.1007/s10543-025-01098-1. Also available: view-only version.
- P. C. Hansen, J. S. Jørgensen, and W. R. B. Lionheart (Eds.), Computed Tomography: Algorithms, Insight, and Just Enough Theory, SIAM, PA, 2021; doi 10.1137/1.9781611976670.
- P. C. Hansen, J. S. Jørgensen, and P. W. Rasmussen, Stopping rules for algebraic iterative reconstruction methods in computed tomography; in 21st International Conference on Computational Science and Its Applications (ICCSA), IEEE (2021), pp. 60–70, doi 10.1109/ICCSA54496.2021.00019.
- A. Horst, B. M. Afkham, Y. Dong, J. Lemvig, Uncertainty quantification for linear inverse problems with Besov prior: a randomize-then-optimize method, Statistics and Computing, 35 (2025), article no. 101, doi 10.1007/s11222-025-10638-2 (open access).
- A. Horst, B. M. Afkham, Y. Dong, J. Lemvig, Bayesian decomposition using Besov priors, Applied Numerical Mathematics, 229 (2026), pp. 87-106, doi 10.1016/j.apnum.2026.05.015.
- A. Horst, T. Jahn, and F. Voigtlaender, Besov regularity of random wavelet series, Studia Mathematics, to appear, arxiv.org/abs/2411.18155.
- A. Horst, J. Lemvig, A. E. Videbæk, On the non-frame property of Gabor systems with Hermite generators and the frame set conjecture, Appl. Comp. Harmonic Anal., 76 (2025), 101747, doi 10.1016/j.acha.2025.101747 (open access).
- R. Huber, Convergence of ray- and pixel-driven discretization frameworks in the strong operator topology, Inverse Problems and Imaging, 24 (2026), pp. 105–137, doi 10.3934/ipi.2026007 (open access).
- R. Huber, A novel interpretation of the Radon transform's ray- and pixel-driven discretizations under balanced resolutions, in T. A. Bubba, R. Gaburro, S. Gazzola, K. Papafitsoros, M. Pereyra, and C: B. Schönlieb (Eds), Scale Space and Variational Methods in Computer Vision. SSVM 2025, Springer (2025), doi 10.1007/978-3-031-92366-1_11.
- R. Huber, R. Clackdoyle, and L. Desbat, Determination of range conditions for general projection pair operators, arxiv.org/abs/2510.07480.
- B. C. S. Jensen, A. Engsig-Karup, and K. Knudsen, Efficient uncertainty quantification and variance-based sensitivity analysis in epidemic modeling using polynomial chaos, Math. Model. Nat. Phenom., 17, article no. 8 (2022), doi 10.1051/mmnp/2022014 (open access).
- B. C. S. Jensen and K. Knudsen, Sound speed uncertainty in acousto-electric tomography, Inverse Problems, 37 (2021), 125011, doi 10.1088/1361-6420/ac37f8.
- B. C. S. Jensen, A. Kirkeby, and K, Knudsen, Feasibility of acousto-electric tomography, Inverse Problems, 40 (2024), 075007, doi 10.1088/1361-6420/ad4669 (open access).
- B. C. S. Jensen, K. Knudsen, and H. Schlüter, Conductivity reconstruction from power density data in limited view, Mathematica Scandinavia, 129 (2023), doi 10.7146/math.scand.a-135820.
- J. S. Jørgensen, E. Ametova, G. Burca, G. Fardell, E. Papoutsellis, E. Pasca, K. Thielemans, M. Turner, R. Warr, W. R. B. Lionheart, and P. J. Withers, Core Imaging Library - Part I: a versatile Python framework for tomographic imaging, Phil. Trans. Royal Soc. A, 379 (2021), 20200193, doi 10.1098/rsta.2020.0192 (open access).
- J. S. Jørgensen, E. Papoutsellis, L. Murgatroyd, G. Fardell, and E. Pasca, A directional regularization method for the limited-angle Helsinki Tomography Challenge using the Core Imaging Library (CIL), Appl. Math. for Modern Challenges, (2023), doi 10.3934/ammc.2023011 (open access).
- M. Karamehmedović and J. Glückstad, Phase-Only Steerable Photonic Nanojets, Optics Express, 31 (2023), pp. 27255–27265, doi 10.1364/OE.497469 (open access).
- M. Karamehmedović and K. Linder-Steinlein, Spectral properties of radiation for the Helmholtz equation with random coefficients, J. Phys. A: Math. Theor., 58 (2025), 015202, doi 10.1088/1751-8121/ad955b (open access).
- M. Karamehmedović, K. Linder-Steinlein, P.-E. Hansen, P. Chen, A. M. A. Alghamdi, and J. Glückstad, Far-field super-resolution imaging using scanning photonic nanojets, Proc. SPIE PC12996, Unconventional Optical Imaging IV, PC1299613 (2024), doi 10.1117/12.3017486.
- M. Karamehmedović, P. Maréchal, M. S. Carøe, and L. Baalbaki, Multi-resolution deconvolution, 2025, submitted; arXiv:2512.23342.
- M. Karamehmedović, K. Scheel, F. L.-S. Pedersen, and P.-E. Hansen, Imaging with a steerable photonic nanojet probe, Proc. SPIE 12203, Enhanced Spectroscopies and Nanoimaging 2022, 1220306 (2022); doi 10.1117/12.2633442
- M. Karamehmedović, K. Scheel, F. L.-S. Pedersen, A. Villegas, and P.-E. Hansen, Steerable photonic jet for super-resolution microscopy, Optics Express, 30 (2022), pp. 41757–41773, doi 10.1364/OE.472992 (open access).
- M. Karamehmedović and F. Triki, Localization and the landscape function for regular Sturm-Liouville operators, Commun. Math. Sci., 22 (2024), pp. 1733–1748, doi 10.4310/CMS.2024.v22.n6.a12 (open access).
- M. Karamehmedović and D. Winterrose, On the transfer of information in multiplier equations, in K. Ammari, C. Jammazi, and F. Triki (eds),Control and Inverse Problems CIP 2022, Birkhäuser (2023), doi 10.1007/978-3-031-35675-9_7.
- A. Kirkeby, M. T. R. Henriksen, and M. Karamehmedović, Stability of the inverse source problem for the Helmholtz equation in R3, Inverse Problems, 36 (2020), 055007, doi 10.1088/1361-6420/ab762d.
- K. Knudsen and A. K. Rasmussen, Direct regularized reconstruction for the three-dimensional Calderón problem, Inverse Problems and Imaging, 16 (2022), pp. 871–894, doi 10.3934/ipi.2022002.
- M. Kryuchkov, Z. Wang, J. Valnohova, V. Savitsky, M Karamehmedović, M. Jobin, and V. L.Katanaev, Smart bio-nanocoatings with simplepost-synthesis reversible adjustment, Biomimetics, 10 (2025), 163, doi 10.3390/biomimetics10030163.
- R. Laumont, Y. Dong, and M. S. Andersen, Sampling strategies in Bayesian inversion: a study of RTO and Langevin methods, Inverse Problems and Imaging, 19 (2025), pp. 592–612, doi 10.3934/ipi.2024046.
- Z. Li, Y. Dong, and X. Zeng, Sparsity via hyperpriors: a theoretical and algorithmic study framework, 2025, submitted to SISC, arXiv.org.2511.06235.
Z. Li, Y. Dong, and X. Zeng, Sparse empirical Bayes with L-smooth hyperpriors, J. Math. Imag. Vis., to appear. - Z. Ma, P.-E. Hansen, H. Wang, M. Karamehmedović, and Q. Chen, Harvey-Shack Theory for a Converging-Diverging Gaussian Beam, J. Optical Soc. Amer. B: Optical Physics, 40 (2023), pp. 1162–1169, doi 10.1364/JOSAB.478801 (open access).
- E. Papoutsellis, E. Ametova, C. Delplancke, G. Fardell, J. S. Jørgensen, E. Pasca, M. Turner, R. Warr, W. R. B. Lionheart, and P. J. Withers, Core Imaging Library - Part II: Multi-channel reconstruction for dynamic and spectral tomography, Phil. Trans. Royal Soc. A, 379 (2021), 20200193. doi 10.1098/rsta.2020.0193 (open access).
- F. H. Pedersen, J. S. Jørgensen, and M. S. Andersen, A Bayesian approach to CT reconstruction with uncertain geometry, Appl. Math. Sci. Eng., 31 (2023), 2166041, doi 10.1080/27690911.2023.2166041 (open access).
- N. Pellizzon, R. Huber, J. Spangenberg, and J. S. Jørgensen, Systematic analysis of penalty-optimized illumination design for tomography volumetric additive manufacturing, 2026, submitted to Additive Manufacturing, arXiv 2602.12178
- A. K. Rasmussen, F. Seizilles, M. Girolami, and I. Kazlauskaite, The Bayesian approach to inverse Robin problems, SIAM/ASA J. Uncertainty Quantification, 12 (2024), pp. 1050–1084, doi 10.1137/23M16206.
- N. A. B. Riis, A. M. A. Alghamdi, F. Uribe, S. L. Christensen, B. M. Afkham, P. C. Hansen, and J. S. Jørgensen, CUQIpy – Part I: computational uncertainty quantification for inverse problems in Python, Inverse Problems, 40 (2024), 045009, doi 10.1088/1361-6420/ad22e7 (open access). See also Part II by A. M. Alghamdi et al. above.
- N. A. B. Riis and Y. Dong, A new iterative method for CT reconstruction with uncertain view angles. In: J. Lellmann, M. Burger, and J. Modersitzki (eds), Scale Space and Variational Methods in Computer Vision. SSVM 2019. Lecture Notes in Computer Science, vol 11603, pp. 156–167 (2019). Springer, doi 10.1007/978-3-030-22368-7_13.
- N. A. B. Riis, Y. Dong, and P. C. Hansen, Computed tomography reconstruction with uncertain view angles by iteratively updated model discrepancy, J. Math. Imag. Vis., 63 (2021), pp. 133–143, doi 10.1007/s10851-020-00972-7. Also available: view-only version.
- N. A. B. Riis, Y. Dong, and P. C. Hansen, Computed tomography with view angle estimation using uncertainty quantification, Inverse Problems, 37 (2021), Articld ID 065007, doi 10.1088/1361-6420/abf5ba.
- M. Rud, Y. Dong, J. M. Everink, H. Järleblad, J. S. Jørgensen, Q. Kernel, B. Madsen, M. Podestà, A. Valentini, M. Salewski, and the TCV Team, Bayesian velocity-space tomography with collision- and charge-exchange-physics prior from fast-ion D-alpha measurements at TCV with uncertainty quantification, Plasma Physics and Controlled Fusion, 68 (2025), 015035, doi 10.1088/1361-6587/ae3858 (open access).
- K. Scheel, B. M. Afkham, and K. Knudsen, Computational uncertainty quantification for parametrized magnetic resonance electrical impedance tomography, in F. Röhren, F. Voss, D. Voss, P. Borchers, and S. Leonhart (Eds), Proc. 23rd Intl. Conf. Biomed. Appl. of EIT, 2023, p. 57, doi 10.5281/zenodo.8037618 (open access).
- B. S. Schmidt, J. S. Jørgensen, J. Rueda-Rueda, J. Galdon-Quíroga, M. García-Moñoz, M. Salewski, and the ASDEX Upgrade Team, Anisotropic regularization for inversion of fast-ion loss detector measurements, Nucl. Fusion, 64 (2024), 106053, doi 10.1088/1741-4326/ad249d (open access).
- L. Seelinger + 22 (incl. A. M. A. Alghamdi, J. S. Jørgensen, and N. A .B. Riis from CUQI), Democratizing uncertainty quantification, J. Comp. Phys., 521, Part 1 (2024), 113542, doi 10.1016/j.jcp.2024.113542 (open access).
- K. Šehić, H. Bredmose, J. D. Sørensen, and M. Karamehmedović, Active-subspace analysis of exceedance probability for shallow-water waves, J. Eng. Math., 126 (2021), article no. 1, doi 10.1007/s10665-020-10080-5.
- K. Šehić, H. Bredmose, J. D. Sørensen, and M. Karamehmedović, Low-dimensional offshore wave input for extreme event quantification, J. Eng. Math., 126 (2021), article no. 13, doi 10.1007/s10665-021-10091-w.
- Z. Shen, Y. Xu, M. S. Andersen, and T. Chen, An efficient implementation for kernel-based regularized system identification with periodic input signals, 2023 62nd IEEE Conference on Decision and Control (CDC), Singapore, Singapore, 2023, pp. 1480–1485, doi 10.1109/CDC49753.2023.10383860 (open access).
- E. Y. Sidky, P. C. Hansen, J. S. Jørgensen, and X. Pan, Iterative image reconstruction for CT with unmatched projection matrices using the generalized minimal residual algorithm, Proc. SPIE 12304, 7th International Conference on Image Formation in X-Ray Computed Tomography, 1230406, SPIE (2022), doi 10.1117/12.2646511 (open access).
- E. Tavakkol, Y. Dong, and S.-M. Hosseini, Image denoising via spatially adaptive directional total generalized variation, Iran. J. Sci. Technol. Trans. Sci., 46, pp. 1283–1294 (2022), doi 10.1007/s40995-022-01342-1 (open access).
- F. Triki and M. Karamehmedović, On the series solutions of integral equations in scattering, Comptes Rendus Mathématiques, 362 (2024), 1023–1035, doi 10.5802/crmath.621 (open access).
- F. Triki, K. Linder-Steinlein, and M. Karamehmedović, Fourier method for inverse source problem using correlation of passive measurements, Inverse Problems, 40 (2024), 105009, doi 10.1088/1361-6420/ad6fc7 (open access).
- F. Triki, K. Linder-Steinlein, and M. Karamehmedović, Stability estimates for the inverse source problem with passive measurements, Inverse Problems and Imaging, Inverse Problems and Imaging, 19 (2025), pp. 133–141, doi 10.3934/ipi.2024028 (open access).
- F. Uribe, J. M. Bardsley, Y. Dong, P. C. Hansen, and N. A. B. Riis, A hybrid Gibbs sampler for edge-preserving tomographic reconstruction with uncertain angles, SIAM/ASA J. Uncertain. Quantif., 10 (2022), pp. 1293–1320, doi 10.1137/21M1412268.
- F. Uribe, Y. Dong, and P. C. Hansen, Horseshoe priors for edge-preserving linear Bayesian inversion, SIAM J. Sci. Comput., 45 (2023), pp. B337-B365, doi 10.1137/22M1510364.
- S. Wang, M. Karamehmedović, and F. Triki, Localization of moving sources: uniqueness, stability, and Bayesian inference, SIAM J. Appl. Math., 83 (2023), pp. 1049–1073, doi 10.1137/22M15006.
- R. Warr, E. Ametova, R. J. Cernik, G. Fardell, S. Handschuh, J. S. Jørgensen, E. Papoutsellis, E. Pasca, and P. J. Withers, Enhanced hyperspectral tomography for bioimaging by spatiospectral reconstruction, Sci. Rep. 11 (2021), 20818, doi 10.1038/s41598-021-00146-4.
- S. Yan and Y. Dong, GMM based simultaneous reconstruction and segmentation in X-ray CT application; in A. Elmoataz, J. Fadil, Y. Quéau, J. Rabin, and L. Simon (Eds), Scale Space and Variational Methods in Computer Vision. SSVM 2021, Lecture Notes in Computer Science, vol 12679, pp. 503–515 (2019), Springer, doi 10.1007/978-3-030-75549-2_40.
- C. Zhang, J. M. Everink, and J. S. Jørgensen, Efficient monotonic Gaussian processes via randomize-then-optimize, J. Comput. Phys. (2026), 114787, doi 10.1016/j.jcp.2026.114787.